
高数笔记-向量函数
Published:
我对自己的要求很低:我活在世上,无非想要明白些道理,遇见些有趣的事。 倘能如我所愿,我的一生就算成功。
前言
由于高数上考的还不错拿了99分,高数上我就偷懒不整理了哈哈哈,高数下我觉得内容很多,首先是对高数上的一个补充。高数上主要是在二维平面上的点线,研究在此基础上的函数性质,而且在之后的专业课学习中我们其实是以高数下为主的。高数下我们主要有两个脉络:从二维到三维是一个很大的飞跃,我们在研究三维的时候其实就是从1到2,再到3,3到正无穷的一个思维方式,为什么这么说?三维对于一直在求解二维问题的我们来说既陌生又可以说是有些熟悉,因为我们可以在生活实际中找到具体的例子来辅助理解,但是当维数一旦超过三维到达四维五维甚至更多维度的时候难以用直观的几何图形去表示,其实都对我们来说是完全陌生的,区别反而没有这么大了,但是我们研究三维空间的方法可以用来研究更多维数,所以我们在学习的时候应该抓住方法而不是因为高中接触过三维空间就掉以轻心;第二,我们在高数上的大部分研究都是基于\mathit{x}和\mathit{y}两个变量,在生活实际中,可能并没有这么纯粹的二元问题,更多情况下我们研究问题需要提取和编码更多的元素,所以我们需要掌握分析多元函数的方法。这两条线应该是我高等数学学习接下来的指导。
希望还能考的这么好吧哈哈哈,坚持每天做几页讲义和笔记。
后记
回首一学期,居然陆陆续续坚持下来写了快70多页高数笔记,感觉每日的积累还是很有成就感的一件事。Latex记笔记虽然比手写麻烦了很多,但是很多符号下标和取值范围还是自己一个字一个字敲过去的时候才真正去思考为什么是这样的取值。记笔记这件事有些人看来用Latex写就是多此一举,更多的像自己写一本书一样,正是站在自己是作者的角度,我对各个知识点之间的联系的认识才更加深刻,才真正做到的能把知识点串成知识网。很多时候上课和看课本的过程对某些知识点还是存在疑惑,有相当一部分的内容是我自己在编写讲义的过程中弄懂的。
除了自己记了这么一份笔记以外,我期末的时候还去给多个专业和班级的同学进行高数答疑。给别人答疑看上去可能是闲的没事干的表现,但是有些时候正是在给别人讲题目的时候,我才注意到了我一直忽视的小细节以及别人对某道题目提出的新思路,很多时候给别人解释他的做法为什么不好或者不可以的时候,需要我结合这个问题的不同角度对题目进行审视,从而实现对知识点的更好理解。学习也不应该是孤立的学习,大家相聚在一起其实并不是给程度较好的人造成麻烦和困扰,我认为如果有人能克服内心的隔阂,能全心给别人讲题目,这一件事已将相当了不起了。能够静下心来做一些旁人看来很蠢的事情的人,才能够克服内心的浮躁,脚踏实地,学有所成。
另外我对高数教材的理解可能比上学期更加成熟了,高数教材不同的大学、不同的专业可能编写水平略有差异,可能国内和国外的差距还是在的,但是如果你把这本书学透了,你回过头去看不同的教材其实讲的也就那么回事,该介绍的知识点也基本上介绍到位了,真正拉开不同教材之间的差距的不过是叙述者的口吻以及思路,或者说“文气”是否贯通。从这个角度来讲,高数这门课如果站在应试的角度来说,学透也就基本上能都做出来。学习的本质应该是一个不断深入的探索过程,而不是在同一个平面“内卷式”刷题。
我的这一份笔记更多的是我对不同知识点的理解,是无法做到替代一本完整的高数教材的,想必有很多作错误,仅供参考,更多的是起到一个启发式的引导。
最后,感谢超哥一学期的教诲,超哥是一个有想法的好老师,希望这次高数考试能考出一个好成绩。
一些性质和前置定理
加减法:
- 交换律
$\mathbf{a} + \mathbf{b} = \mathbf{b} + \mathbf{a}$ - 结合律
$\mathbf{a} + \mathbf{b} + \mathbf{c} = \mathbf{a} + \mathbf{c} + \mathbf{b}$
数乘
- 结合律
$\lambda(\mu \mathbf{a})$ - 分配律
$(\lambda + \mu) \mathbf{a} = \lambda \mathbf{a} + \mu \mathbf{a}$
$\lambda(\mathbf{a} + \mathbf{b}) = \lambda \mathbf{a} + \lambda \mathbf{b}$
三角不等式 \(\mid \mathbf{a} + \mathbf{b}\mid \le \mid \mathbf{a}\mid + \mid \mathbf{b}\mid\)
零向量与任何向量均共线,零向量与一切数的乘积均为零向量 $\lambda \cdot \mathbf{0} = \mathbf{0}$
向量共线的判定 若对两个向量 $\mathbf {a}$ 与 $\mathbf {b}$ 存在一个实数 $\lambda$,使得
\[\mathbf {a} = \lambda \cdot \mathbf {b} \quad \text{或} \quad \mathbf {b} = \lambda \cdot \mathbf {a}\]则 $\mathbf {a}$ 与 $\mathbf {b}$ 共线
向量的乘积具有很多形式
普通点积 (matmul product)
给定矩阵 $A_{m \times n}$ 和 $B_{n \times p}$:
矩阵 $AB$ 的元素 $(AB)_{ij}$ 表示为:
\[(AB)_{ij} = \sum_{k=1}^{n} a_{ik} b_{kj} = a_{i1}b_{1j} + a_{i2}b_{2j} + \cdots + a_{in}b_{nj}\]设 $\mathbf{a}$ 与 $\mathbf{b}$ 为两个非零向量,$<\mathbf{a}, \mathbf{b}>$ 表示它们之间的夹角,范围在 $[0, \pi]$ 内。向量 $\mathbf{a}$ 与 $\mathbf{b}$ 的内积定义为:
\[\mathbf{a} \cdot \mathbf{b} = \mid \mathbf{a}\mid \mid \mathbf{b}\mid \cos <\mathbf{a}, \mathbf{b}>\]哈德玛积(Hadamard product) $A$, $B$ 为两个任意矩阵
\[A\otimes B= \begin{pmatrix} a_{11}B &\cdots &a_{1n}B\\ \vdots &\ddots &\vdots \\ a_{m1}B &\cdots &a_{mn}B\\ \end{pmatrix}\]外积 $a\in R^{M} \quad b\in R^{N}$ \(A\otimes B=\begin{pmatrix} a_{1}b_{1}&\cdots&a_{1}b_{N}\\ \vdots&\ddots&\vdots\\ a_{M}b_{1}&\cdots&a_{M}b_{N}\\ \end{pmatrix}\)
向量积
叉乘(The cross product)
Definition:
\[\mathbf{u} \times \mathbf{v} = \left( |\mathbf{u}| \cdot |\mathbf{v}| \sin \theta \right) \mathbf{n}\] \[|\mathbf{u} \times \mathbf{v}| = |\mathbf{u}| \cdot |\mathbf{v}| \sin \theta\]叉乘又叫做向量积,是我们将二维平面的向量概念延展到三维向量的重要一步,向量积是在物理研究力矩的时候提出的,具体证明我放在了大学物理的讲义中。
单位向量在向量表示中占有很重要的地位。这个在二维平面中最简单的就是 $\mathbf{i}$ 和 $\mathbf{j}$ 表示 $\mathit{x}$ 轴和 $\mathit{y}$ 轴的单位向量,如果用线性代数的知识来说,这两个向量就是这个平面所有向量组成的向量组的一个基,这个二维平面内的所有向量都能够利用这两个向量表示出来。如果我们再深入研究,二维平面的向量组的基,并不严格要求相互垂直,我们只需要不共线的向量就能够做到表示其他一切向量。
我们定义在三维向量中的坐标可以分解为 $x、y、z$ 轴三个分量的之和 $\mathbf{r} = x\mathbf{i} + y\mathbf{j} + z\mathbf{k}$。此时$\mathbf{i}, \mathbf{j}, \mathbf{k}$是三个基底也是三个单位向量。$\mathbf{i} \times \mathbf{i} = \mathbf{j} \times \mathbf{j} = \mathbf{k} \times \mathbf{k} = 0$、$\mathbf{i} \times \mathbf{j} = \mathbf{k}$、$\mathbf{j} \times \mathbf{k} = \mathbf{i}$、$\mathbf{k} \times \mathbf{i} = \mathbf{j}$。
所以我们回过头来看单位向量这个概念,我们其实是想用这个定义来描述某一个给定向量的方向,我们想要的只是一个方向向量,为了避免对我们表示结果的影响。这个向量不应该有数值,从这个角度出发,单位向量的长度大小为1。
值得一提的是,单位向量有时候又叫做基底、单位矢量等。虽然名称可能根据不同的教材和学科会有不同,但是我们把握单位向量的引入概念就足够了。
向量的表示
极坐标系表示下: \(\mathbf{a} = |\mathbf{a}|\mathbf{\hat{a}}\)
空间直角坐标系表示下: \(\mathbf{a} = |\mathbf{a}|\mathbf{e}\)
我们现在来看看叉乘在三维空间中的表现。向量叉乘的结果是垂直于原有两个向量所在平面的一个向量。
引入向量叉乘的概念后,列出叉乘的几个基本性质:
\(\mathbf{a} \times \mathbf{a} = 0\) \(\mathbf{a} \times \mathbf{b} = 0 \rightarrow \mathbf{a} \parallel \mathbf{b}\)
向量 $\mathbf{a}$ 和 $\mathbf{b}$ 的叉乘结果相当于图像中平行四边形的面积大小。
向量积的运算规律
\[\mathbf{a} \times \mathbf{b} = -\mathbf{b} \times \mathbf{a}\] \[(\mathbf{a} \times \mathbf{b}) \times \mathbf{c} = \mathbf{a} \times \mathbf{c} + \mathbf{b} \times \mathbf{c}\] \[(\lambda \mathbf{a}) \times \mathbf{b} = \mathbf{a} \times (\lambda \mathbf{b})\]叉乘可以通过三阶行列式计算:
\[\mathbf{a} \times \mathbf{b} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ a_x & a_y & a_z \\ b_x & b_y & b_z \\ \end{vmatrix}\]混合积
叉乘与点乘结合可以引入混合积的概念,描述如下:
设 $\mathbf{a} = (a_x, a_y, a_z)$,$\mathbf{b} = (b_x, b_y, b_z)$,$\mathbf{c} = (c_x, c_y, c_z)$,则
\[(\mathbf{a} \times \mathbf{b}) \cdot \mathbf{c} = \begin{vmatrix} a_x & a_y & a_z \\ b_x & b_y & b_z \\ c_x & c_y & c_z \\ \end{vmatrix}\]如图所示,叉乘结果是沿 $\overrightarrow{OC_1}$ 方向的一个向量,其大小为平行四边形 OABD 的面积大小,再与 $\mathbf{c}$ 做点乘,相当于再乘以 $\mathbf{c}$ 在 $\overrightarrow{OC}$ 方向的投影,代表了平行六面体的体积。
平面及其方程
首先,对于平面的描述,我们试着站在数学家的角度去考虑。 如果我们对平面方程一无所知,我们要去描述一个平面可以用怎样的方法?
在试着描述平面之前,对于给定曲面 $S$ 我们有三元方程 $F(x,y,z)=0$ 我们先提出两个理所当然的关系:
- 曲面 $S$ 上的任意一点都满足平面方程。
- 如果某一点不在曲面 $S$ 上,则该点的坐标不满足平面方程。
平面方程
如果要固定一个平面,我们首先想到的是利用向量,我们还能用交叉的直线,或者是三个不共线的点,表示平面的方法我们有很多,但是我们已知该平面是唯一确定的,所以无论我们是用什么手段去表示平面方程,所给出的表达式应该是等价的,也就是可以相互推导的。
- 点法式:一点+过该点的直线(该直线作为平面的法线)
- 三点式:三个不共线的点
- 标准式:两个不共线的直线(向量)+一个点
- 一般式
给定一个向量 $\mathbf{n}=(A,B,C)$,以及一个点 $M(x_{0},y_{0},z_{0})$,我们知道平面上任意取一点 $N(x,y,z)$ 都有 $\overrightarrow{MN}\perp\mathbf{n}$
\[\mathbf{n^{T}} \cdot \overrightarrow{MN} = \begin{pmatrix} A \\ B \\ C \\ \end{pmatrix} \cdot \begin{pmatrix} x - x_{0} & y - y_{0} & z - z_{0} \end{pmatrix}\] \[A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\]然后根据式(11)我们可以整理出平面方程的一般式,一般式再经过整理可以得到平面方程的截距式
\[Ax + By + Cz + D = 0\] \[\dfrac{x}{a} + \dfrac{y}{b} + \dfrac{z}{c} = 1\]我们看一般式,$(A,B,C)$ 为该平面的法向量,当 $D=0$ 时该平面过原点;$A=0$ 但 $B,C\ne 0$ 时该平面平行 $x$ 轴,过不过 $x$ 轴取决于 $D$ 等不等于0;$A=B=0$ 但 $C,D\ne 0$ 时该平面平行 $xOy$ 平面;其他情况以此类推,但是 $A,B,C$ 不同时为零。
但是我们看截距式,我们会发现这个平面交坐标轴于 $(a,0,0),(0,b,0),(0,0,c)$。若该平面在一个轴上没有截距,则这个平面平行于该轴,表达式为两元一次方程;若该平面在两个轴上没有截距,则这个平面平行于这两个轴,表达式为一元一次方程。由于 $a,b,c$ 在分母上,不能等于零,所以截距式是不能过原点的。
我们之前用一点一直线能够描述一个平面的具体位置,我们接下来试试看用两条直线加一个点来约束一个平面,这就是平面的标准型,已知平面上一点 $(x_{0},y_{0},z_{0})$ 和两个向量 $(u_{1},u_{2},u_{3})(v_{1},v_{2},v_{3})$。
\[\begin{vmatrix} x - x_{0} & y - y_{0} & z - z_{0} \\ u_{1} & u_{2} & u_{3} \\ v_{1} & v_{2} & v_{3} \\ \end{vmatrix} = 0\]然后我们讲一下最简单的一个表示方法————三点式,这个方法只需要三个不共线的点,我们就能画出三条不平行的相交直线,我们用其中的两条相交直线就能够约束一个平面的坐标。我们选用三点其中任意一点 $(x_{0},y_{0},z_{0})$,用其他两点的坐标减该点,再进行行列式计算
\[\begin{vmatrix} x - x_{0} & y - y_{0} & z - z_{0} \\ x_{1} - x_{0} & y_{1} - y_{0} & z_{1} - z_{0} \\ x_{2} - x_{0} & y_{2} - y_{0} & z_{2} - z_{0} \\ \end{vmatrix} = 0\]其实我们回过头来看这个三点式的行列式和标准式的行列式是殊途同归的。
其他平面相关的定理
在高中我们就以及知道了,两个平面之间的夹角我们规定在0到 $90^{\circ}$ 之间,我们可以用两个平面的法向量把两个平面的夹角表示出来。

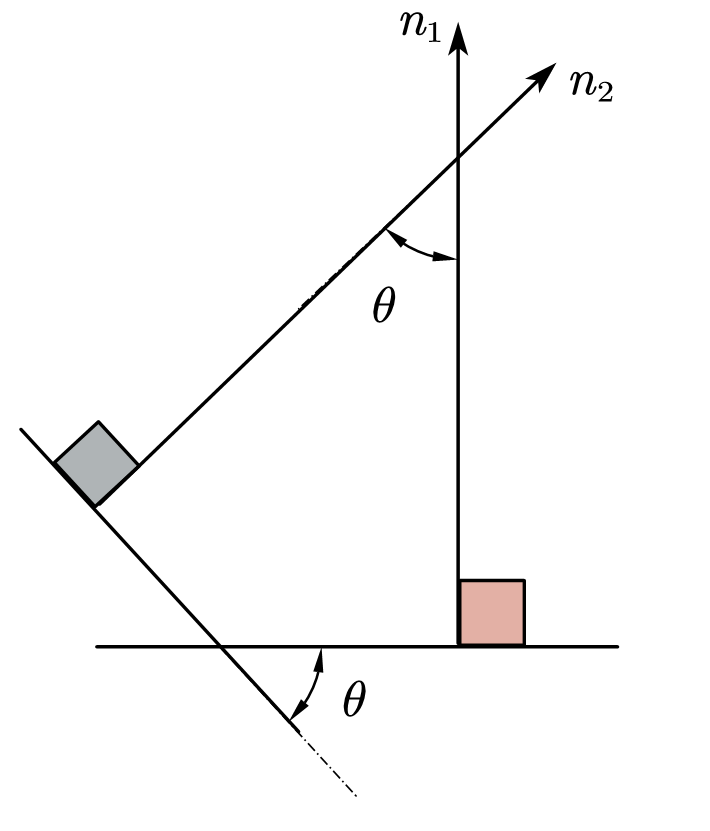
根据角度表达式,我们可以得知
- 两平面互相垂直相当于 $A_{1}A_{2}+B_{1}B_{2}+C_{1}C_{2}=0$
- 两平面互相平行或重合相当于 $\dfrac{A_{1}}{A_{2}}=\dfrac{B_{1}}{B_{2}}=\dfrac{C_{1}}{C_{2}}$
如果我们要求平面外一点到平面内的距离,我们可以先找到经过平面外该点的法向量,再找平面上一点 $P_{1}$, 距离 $\mathit{d}$ 就是 $\overrightarrow{P_{1}P}$ 在法向量上的投影。
\[d = \mid \overrightarrow{P_{1}P}\mid \mid \cos\theta\mid = \dfrac{\mid \overrightarrow{P_{1}P}\cdot \mathbf{n}\mid }{\mid \mathbf{n}\mid } = \dfrac{\mid Ax_{0} + By_{0} + Cz_{0} + D\mid }{\sqrt{A^{2} + B^{2} + C^{2}}}\]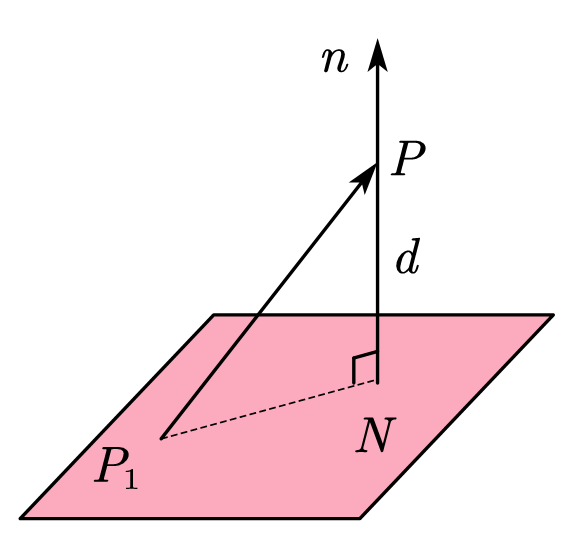
空间直线
首先我们明确为什么直线要放在平面之后来介绍。在人认识事物的过程是中,基本上符合从面到线的过程,直线我们可以看作是平面相交的结果,同理曲线是曲面相交的结果。在机械制图里面我们有截交线和相贯线。对于曲面和曲线的研究难度更大,很多问题上不能通过方程来达到直观的认识,在之后的工作中我们基本上是用建模软件来研究复杂的三维事物。
然后我们之后研究直线也是要抓住直线的位置关系,利用向量来列方程。
- 一般式
- 点向式:一点,一个方向向量
- 两点式
- 参数方程
我们已经说到了,直线是由两平面相交得到,那么我们联立两个平面方程,这个方程组保证了直线上的点同时满足两个平面方程。
\[\left\{ \begin{array}{ll} A_{1}x+B_{1}y+C_{1}z+D_{1}=0\\ A_{2}x+B_{2}y+C_{2}z+D_{2}=0\\ \end{array} \right.\]接下来我们介绍点向式。如果我们在空间中给定一个点,再通过确定一个向量我们可以来表示一条直线,由于直线是无限伸展的,那么我们所给的向量大小并没有要求,只需要一个单位向量就行了。
给定一个点 $P(x_{0},y_{0},z_{0})$,方向向量 $\mathit{\mathbf{s}}=(m,n,p)$
\[\dfrac{x-x_{0}}{m}=\dfrac{y-y_{0}}{n}=\dfrac{z-z_{0}}{p}\]该方程也叫做直线的对称式方程。
再介绍点向式之后我们令三个等式等于一个参数,我们就可以得出直线的参数方程
\[\dfrac{x-x_{0}}{m}=\dfrac{y-y_{0}}{n}=\dfrac{z-z_{0}}{p}\]经过整理我们得到参数方程
\[\left\{ \begin{array}{ll} x=x_{0}+mt\\ y=y_{0}+nt\\ z=z_{0}+pt\\ \end{array} \right.\]最后我们再补充另外一个表达式,我们常说两点确定一条直线,在三维空间里我们也是通过已知的两点,画出唯一确定的一条直线。
\[P_{1}=(x_{1}, y_{1}, z_{1}), \quad P_{2}=(x_{2}, y_{2}, z_{2})\]空间直线的夹角与距离公式
以上我们介绍了直线的四种表达形式,但是我们真正要抓住直线的本质和几何关系。我们引入了向量来表示直线,那么我们就很容易利用向量来求直线与直线,直线与平面之间的夹角。计算夹角的时候我们会因为角度是取哪一个而困扰,我们规定直线与直线的成角为锐角或直角,在$[0^{\circ},90^{\circ}]$之间。直线与平面的夹角可以为直角锐角或者钝角,在$[0^{\circ},180^{\circ}]$之间
首先我们来思考直线与直线之间的夹角,因为直线的表达式有点向式,那么我们可以通过计算两条直线的方向向量之间的夹角来求直线与直线之间的夹角。
我们已知两个方向向量 $\mathit{\mathbf{s_{1}}} = (m_{1}, n_{1}, p_{1})$ 和 $\mathit{\mathbf{s_{2}}}=(m_{2},n_{2},p_{2})$
我们通过余弦计算公式可得:
\[\cos\varphi =\dfrac{\mid m_{1}m_{2}+n_{1}n_{2}+p_{1}p_{2}\mid }{\sqrt{m_{1}^{2}+n_{1}^{2}+p_{1}^{2}}\sqrt{m_{2}^{2}+n_{2}^{2}+p_{2}^{2}}}\]同理直线的方向向量与平面的法向量之间的夹角就是该直线与平面所成角的余角.直线方向向量$\mathbf{\mathit{s}}=(m,n,p)$,平面法向量$\mathbf{\mathit{n}}=(A,B,C)$
\[\sin\varphi =\dfrac{\mid Am+Bn+Cp\mid }{\sqrt{m^{2}+n^{2}+p^{2}}\sqrt{A^{2}+B^{2}+C^{2}}}\]然后我们还是抓住向量这个工具来研究直线,如果一个直线和直线平行,那么两个直线的方向向量对应分量成比例。
\[\dfrac{m_{1}}{m_{2}}=\dfrac{n_{1}}{n_{2}}=\dfrac{p_{1}}{p_{2}}\]如果两条直线垂直,那么它们的方向向量应该乘积等于0。
\[m_{1}m_{2}+n_{1}n_{2}+p_{1}p_{2}=0\]如果一个直线与平面平行,那么直线的方向向量垂直于平面的法向量。
\[Am+Bn+Cp=0\]如果一个直线与平面垂直,那么直线的方向向量平行与平面的法向量
\[\dfrac{m}{A}=\dfrac{n}{B}=\dfrac{p}{C}\]然后我们要补充一个概念————平面束
我们在空间中想象一条直线,我们可以明确通过这个直线的平面有无数个,我们将这些平面的全体称为平面束。
由方程
\[\left\{ \begin{array}{ll} A_{1}x+B_{1}y+C_{1}z+D_{1}=0\\ A_{2}x+B_{2}y+C_{2}z+D_{2}=0\\ \end{array} \right.\]其中 $A_{1},B_{1},C_{1}$ 与 $A_{2},B_{2},C_{2}$ 不成比例,我们构建三元一次方程组
\[A_{1}x+B_{1}y+C_{1}z+D_{1}+\lambda(A_{2}x+B_{2}y+C_{2}z+D_{2})=0\]注意,这个方程表示的平面不包括 $A_{2}x+B_{2}y+C_{2}z+D_{2} $平面
曲面及其方程
在研究曲面的时候,我们把去曲面分为旋转曲面、柱面和二次曲面。
首先我们研究球形,球形可以看作是圆绕着某一个轴进行旋转,但是我们研究球的时候可以抓住两个几何特征。
首先球面上各点到球心的距离都相等,我们可以用两点之间的距离公式来表示
\[\sqrt{(x-x_{0})^{2}+(y-y_{0})^{2}+(z-z_{0})^{2}}=R\\ A(x^{2}+y^{2}+z^{2})+Dx+Ey+Fz+G=0\]我们要注意,简单曲面是没有交叉项如 $xy$ 的,球的平方项系数相等。
然后,我们任意选取球的一个轴作为旋转轴,我们拿一个垂直该对称轴的平面去截切,我们会发现截切出来的图形是一个圆,圆上的每一点到圆心(旋转轴轴)的距离是相等的。
我们顺着这个思路引入旋转曲面的介绍
旋转曲面
曲面可以看作一条直线绕着旋转一周所形成的,我们将旋转的曲线叫做旋转曲面,把定直线称为轴。
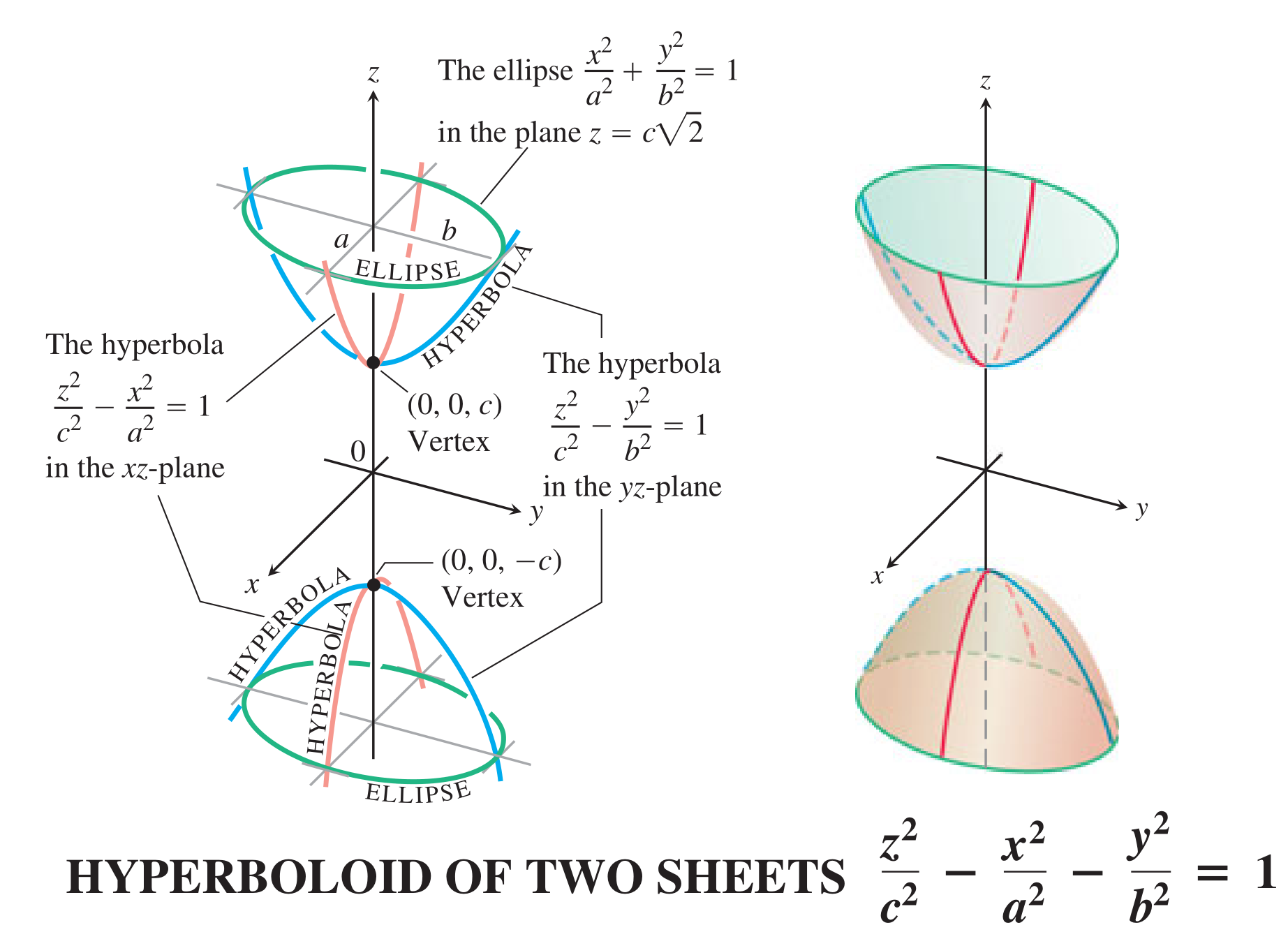
旋转双曲面是 $xOz$ 坐标面的双曲线 $\dfrac{x^{2}}{a^{2}}-\dfrac{z^{2}}{c^{2}}=1$ 分别绕 $z$ 轴和 $x$ 轴旋转一周。
绕 $\mathit{z}$ 轴旋转我们得到旋转单叶双曲面,绕$x$轴旋转我们能得到旋转双叶双曲面
\[\dfrac{x^{2}+y^{2}}{a^{2}}-\dfrac{z^{2}}{c^{2}}=1\\ \dfrac{x^{2}}{a^{2}}-\dfrac{z^{2}+y^{2}}{c^{2}}=1\]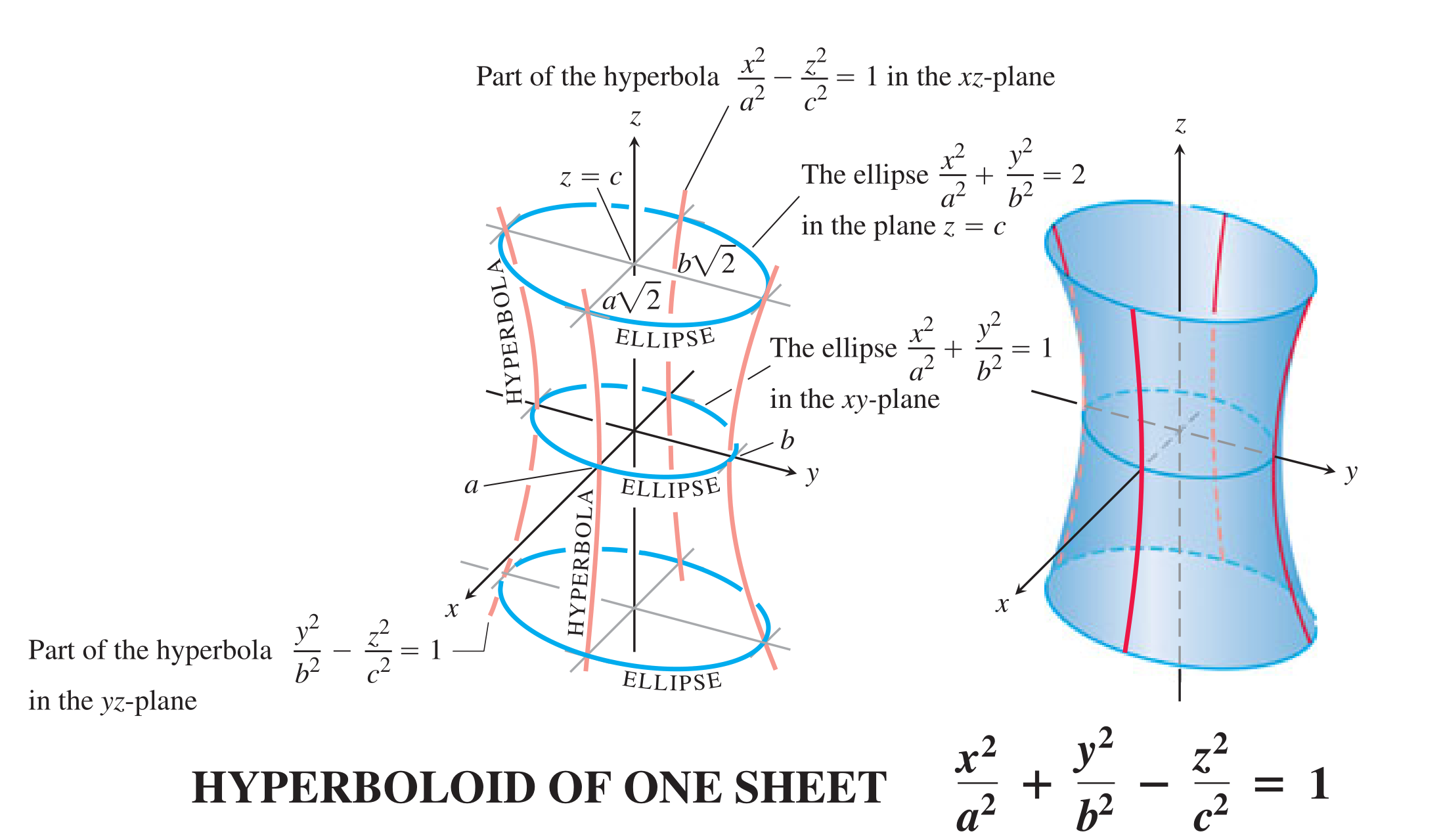
柱面的情形比旋转面较为简单,我们柱面的方程只有 $x,y,z$ 其中的两项,有一项确实使得该图像不受该坐标限制。
椭圆锥面其实说到底我们任找一个垂直于轴的平面去截它,我们得到的图形是一个椭圆,最典型的轴是$z$轴,当我们选定一个平行于 $xOy$ 的平面,我们代入到椭圆锥方程中,整理得到的形式应该是一个椭圆方程。
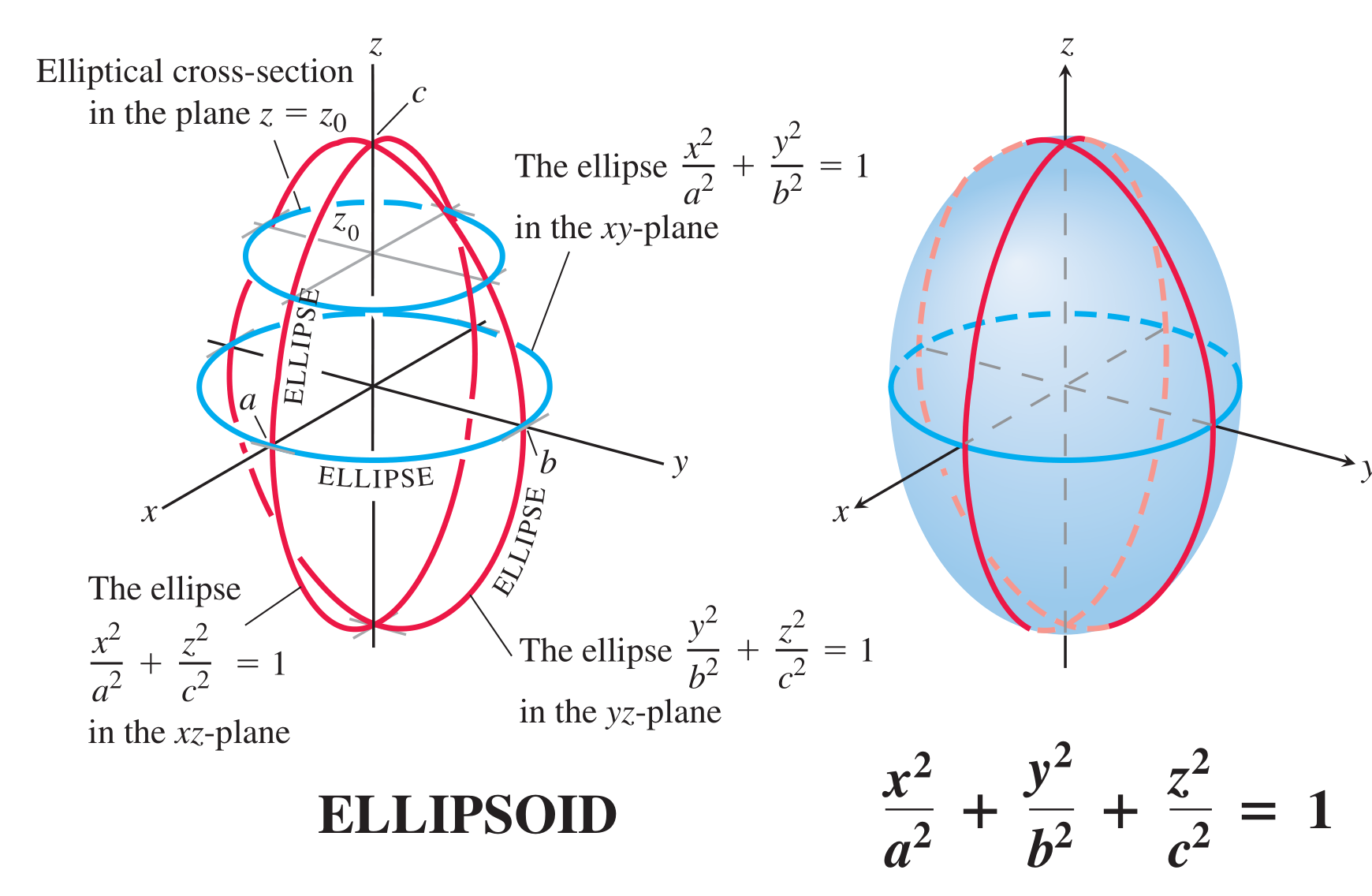
\[\dfrac{x^{2}}{a^{2}}+\dfrac{y^{2}}{b^{2}}=z^{2}\]对于椭球面,其实就是椭圆增加了一个维度
\[\dfrac{x^{2}}{a^{2}}+\dfrac{y^{2}}{b^{2}}+\dfrac{z^{2}}{c^{2}}=1\]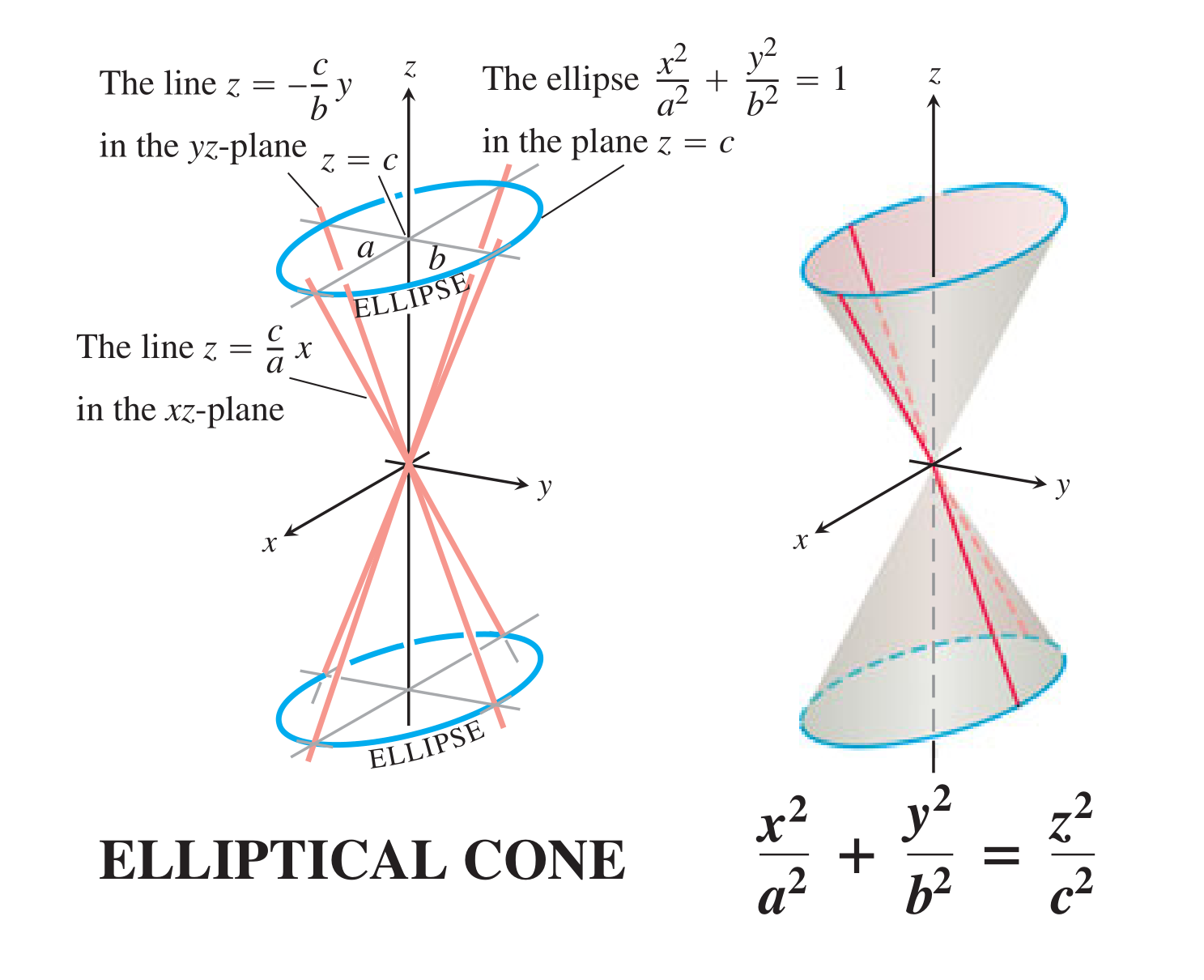
我们还可以将抛物线进行旋转和拉伸得到椭圆抛物面
\[\dfrac{x^{2}}{a^{2}}+\dfrac{y^{2}}{b^{2}}=z\]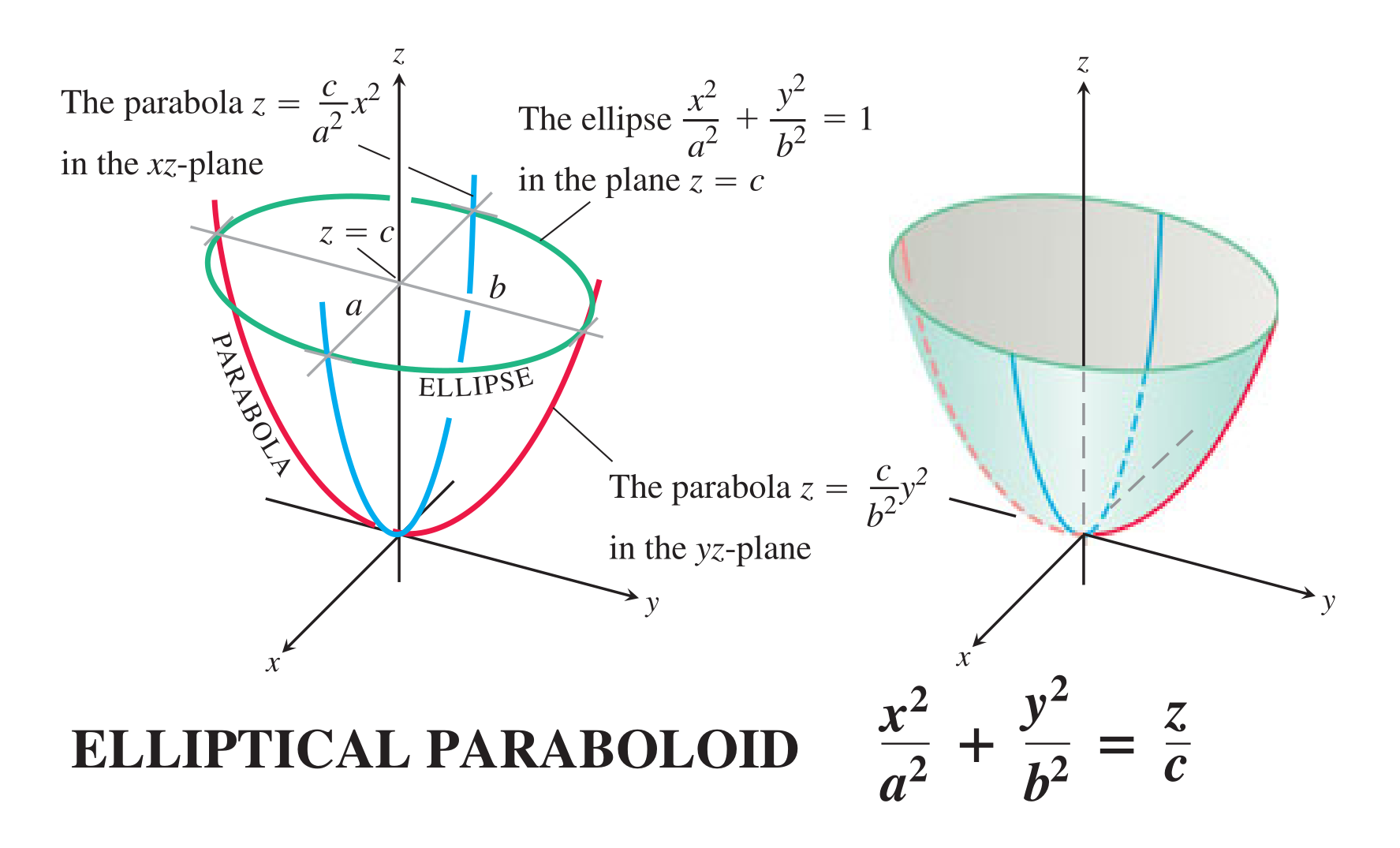
空间曲线
空间曲线我们可以看作是两个曲面的交线,所以我们想要表示空间中的一条曲线,我们只需要联立两个平面方程即可,这个就是空间直线的一般方程。
\[\left\{ \begin{array}{ll} F(x,y,z)=0\\ G(x,y,z)=0 \end{array} \right.\]针对一些物理问题和简单的空间曲线,我们可以利用参数方程来进行表示
\[\left\{ \begin{array}{ll} x=x(t)\\ y=y(t)\\ z=z(t) \end{array} \right.\]我们补充了向量的概念,接下来我们来结合向量和函数
向量函数
空间曲线 $\tau$ 的参数方程为
\[\left\{ \begin{array}{ll} x=\varphi(t),\\ y=\psi(t),\quad t\in[\alpha,\beta]\\ z=\omega(t), \end{array} \right.\]我们可以用向量形式改写
\[\mathit{\mathbf{r}}=x\mathit{\mathbf{i}}+y\mathit{\mathbf{j}}+z\mathit{\mathbf{k}},\quad \mathit{\mathbf{f}}(t)=\varphi(t)\mathit{\mathbf{i}}+\psi(t)\mathit{\mathbf{j}}+\omega(t)\mathit{\mathbf{k}}\]记为
\[\mathit{\mathbf{r}}=\mathit{\mathbf{f}}(t),\quad t\in[\alpha,\beta]\]向量函数定义
设数集 $D\subset \mathbf{R}$,则称映射 $\mathit{\mathbf{f}}:\mathit{D}\rightarrow\mathbf{R}^{n}$ 为一元向量函数,通常记为
\[\mathit{\mathbf{r}}=\mathit{\mathbf{f}}(t),\quad t\in \mathit{D}\]其中数集 $\mathit{D}$ 称为函数值的定义域,$\mathit{\mathbf{t}}$ 称为自变量,$\mathit{\mathbf{r}}$ 称为因变量。
向量函数极限定义
设向量函数 $\mathbf{f}(t)$ 在点 $t_{0}$ 的某一去心邻域内有定义。如果存在一个常向量 $\mathbf{r_{0}}$,对任意给定的正数 $\epsilon$,总存在正数 $\delta$,使得当 $t$ 满足 $0<\mid t-t_{0}\mid <\delta$ 时,对应的函数值 $\mathbf{f}(t)$ 都满足不等式
\[\mid \mathbf{f}(t)-\mathbf{r}_{0}\mid <\epsilon\]那么,常向量 $\mathbf{r_{0}}$ 叫做向量函数 $\mathbf{f(t)}$ 当 $t\rightarrow t_{0}$ 时的极限,记作
\[\lim\limits_{t\rightarrow t_{0}}\mathbf{f}(t)=\mathbf{r}_{0}\]向量函数导数的定义
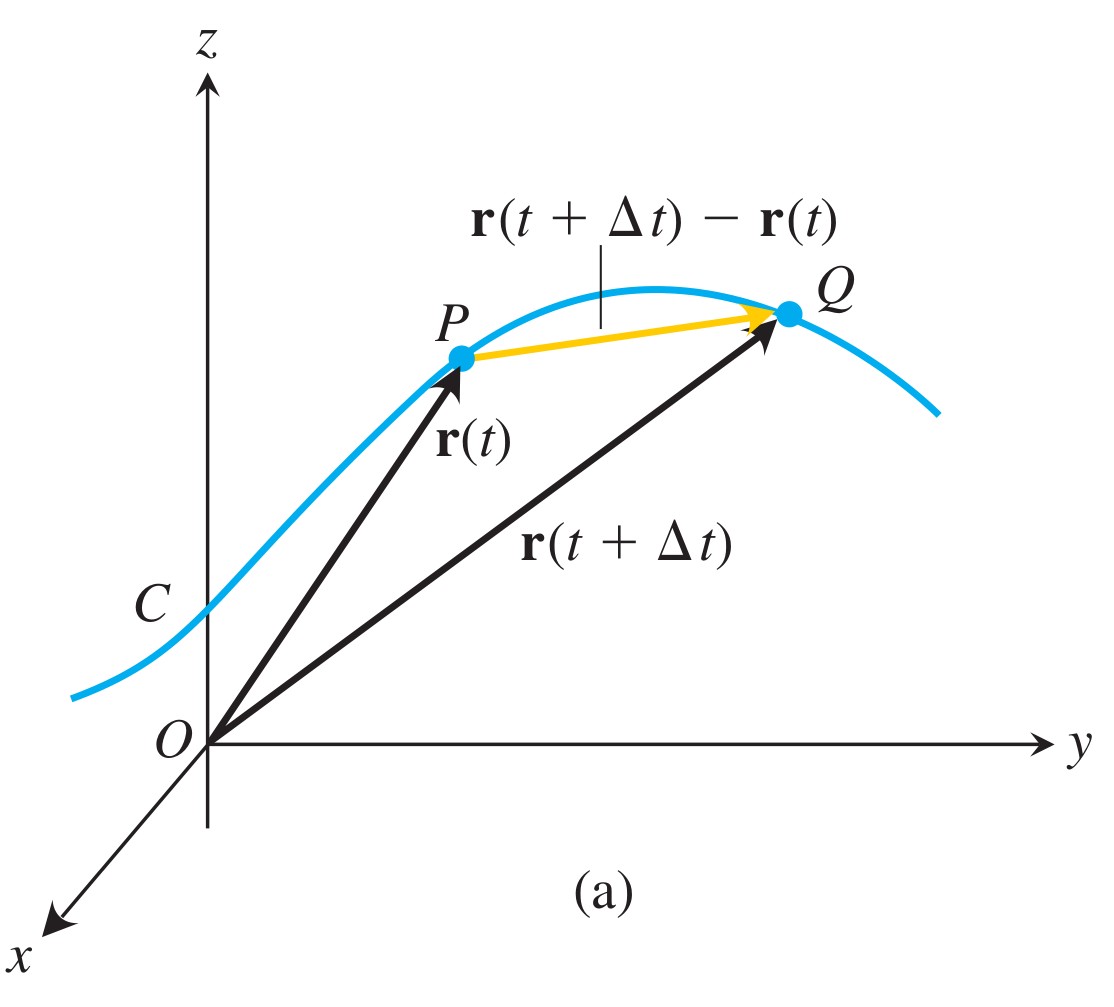
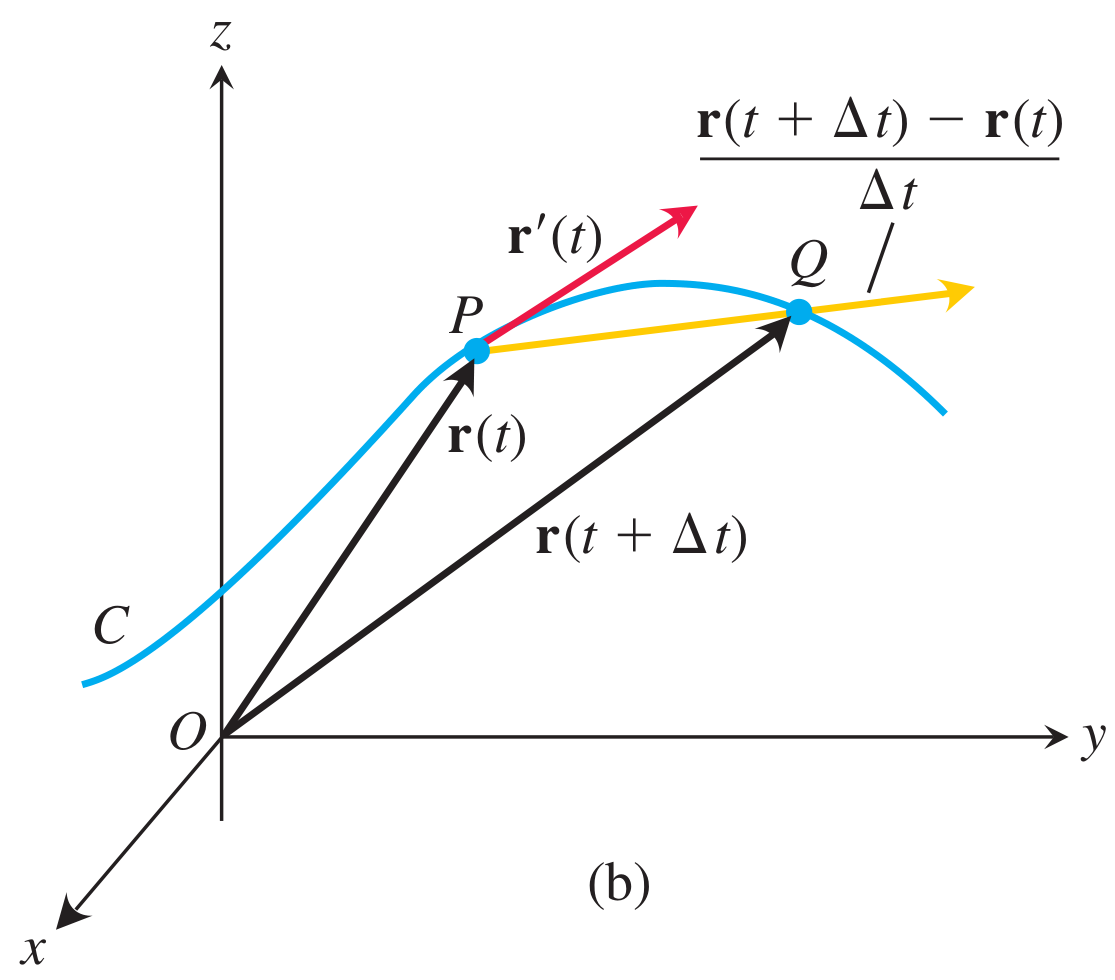
设设向量函数 $\mathit{\mathbf{r}}=\mathit{\mathbf{f}}(t)$ 在点 $t_{0}$ 的某一去心邻域内有定义。如果
\[\lim\limits_{\Delta t\rightarrow0}\dfrac{\Delta \mathit{r\mathbf{}}}{\Delta t}=\lim\limits_{\Delta t\rightarrow0}\dfrac{\mathit{\mathbf{f}}(t_{0}+\Delta t)-\mathit{\mathbf{f}}(t_{0})}{\Delta t}\]存在,那么就称这个极限向量为向量函数 $\mathit{\mathbf{r}}=\mathit{\mathbf{f}}(t)$ 在点 $t_{0}$ 处的导数或导向量,记作 $\mathit{\mathbf{f}}’(t_{0})$
空间曲线的切线和法平面
空间曲线 $\tau$ 的参数方程为
\[\left\{ \begin{array}{ll} x=\varphi(t),\\ y=\psi(t),\quad t\in[\alpha,\beta]\\ z=\omega(t), \end{array} \right.\]我们要求曲线 $\tau$ 上的一点 $M(x_{0},y_{0},z_{0})$ 处的切线及法平面方程。
导向量 $\mathit{\mathbf{T}}=\mathit{\mathbf{f}}’(t_{0})=(\varphi’(t_{0}),\psi’(t_{0}),\omega’(t_{0}))$ 就是曲线 $\tau$ 在点 $\mathit{\mathbf{M}}$ 处的一个切向量,从而我们可以得到点 $\mathit{\mathbf{M}}$ 处的切线方程为
\[\dfrac{x-x_{0}}{\varphi'(t_{0})}=\dfrac{y-y_{0}}{\psi'(t_{0})}=\dfrac{z-z_{0}}{\omega'(t_{0})}\]过点 $\mathit{\mathbf{M}}$ 且与切线垂直的平面称为曲线 $\tau$ 在点 $\mathit{\mathbf{M}}$ 处的法平面,它是通过点 $M(x_{0},y_{0},z_{0})$ 且以 $\mathit{\mathbf{T}}=\mathit{\mathbf{f}}’(t_{0})$为 法向量的平面,因此根据我们先前所学的,我们可以得到法平面方程
\[\varphi'(t_{0})(x-x_{0})+\psi'(t_{0})(y-y_{0})+\omega'(t_{0})(z-z_{0})=0\]曲面的切平面和法线
我们先有曲面的隐式方程
\[F(x,y,z)=0\]在曲面上选一点 $M(x_{0},y_{0},z_{0})$,通过该点有无数条曲线,我们设曲线方程为
\[x=\varphi(t), y=\psi(t),z=\omega(t)\]$t=t_{0}$ 对于 $M$ 点我们可以得到曲线的切线方程
\[\dfrac{x-x_{0}}{\varphi'(t_{0})}=\dfrac{y-y_{0}}{\psi'(t_{0})}=\dfrac{z-z_{0}}{\omega'(t_{0})}\]我们做关于该点平面的切平面,我们可以得知切平面与通过该点的无数条曲线都相切。
\[F(\varphi(t),\psi(t),\omega(t))\equiv 0\]对两边求偏导我们有
\[\dfrac{\mathrm{d}}{\mathrm{d}t}F(\varphi(t),\psi(t),\omega(t))\bigg|_{t=t_{0}}\]该式即为 $\mathit{F}$ 的全导数,我们可以写成
\[\varphi'(t_{0})F_{x}(x_{0},y_{0},z_{0})+\psi'(t_{0})F_{y}(x_{0},y_{0},z_{0})+\omega'(t_{0})F_{z}(x_{0},y_{0},z_{0})=0\]观察这个式子我们可以发现是由两个向量点乘得到的
\[\mathit{\mathbf{n}}=(F_{x}(x_{0},y_{0},z_{0}),F_{y}(x_{0},y_{0},z_{0}),F_{z}(x_{0},y_{0},z_{0}))\]为切平面的法向量。
\[T=(\varphi'(t_{0}),\psi'(t_{0}),\omega'(t_{0}))\]为我们选的这条曲线的切向量。
根据之前我们得出的平面的表达式我们选用点法式来利用该点坐标和法向量来表示该平面
\[F_{x}(x_{0},y_{0},z_{0})(x-x_{0})+F_{y}(x_{0},y_{0},z_{0})(y-y_{0})+F_{z}(x_{0},y_{0},z_{0})(z-z_{0})\]